Software screenshot:
Rincian Software:
Versi: 1.0.2
Tanggal Upload: 15 Apr 15
Pengembang: Dihav
Lisensi: Gratis
Popularitas: 92
Ukuran: 11911 Kb
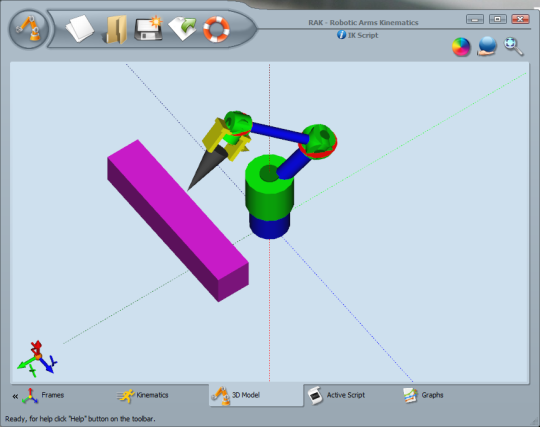
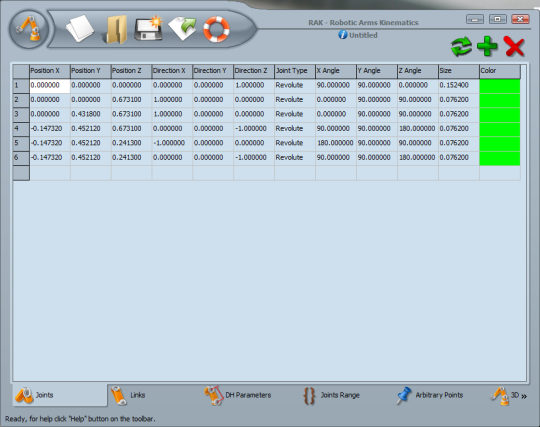
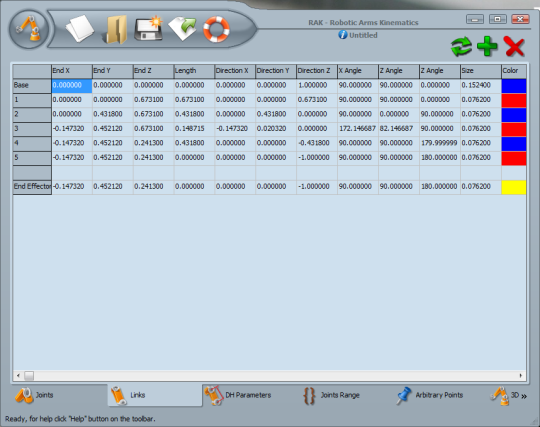
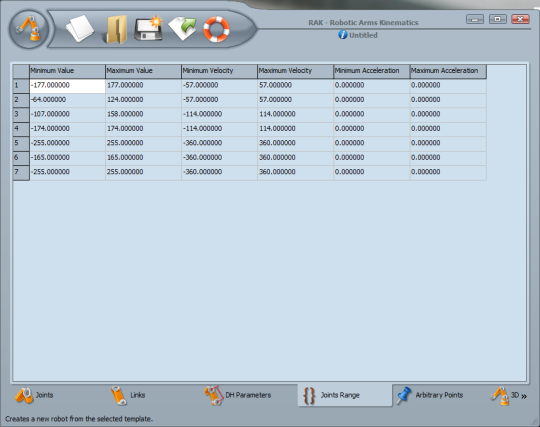
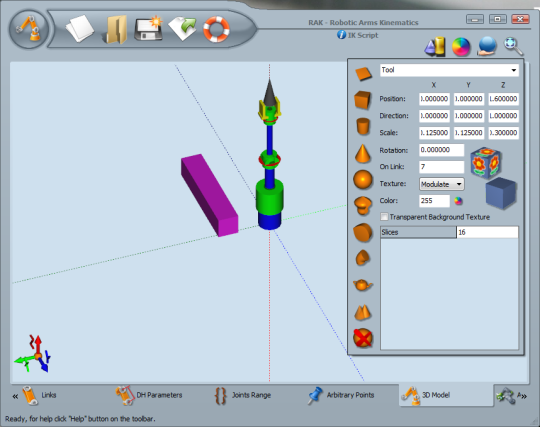
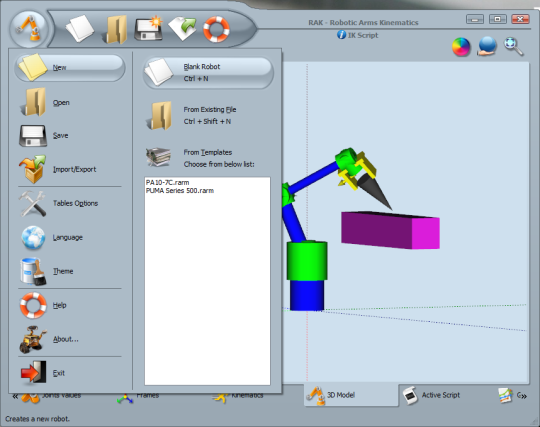
RAK adalah sebuah program untuk pemodelan lengan robot dan menghitung kinematika mereka.
Program ini dapat mensimulasikan loop terbuka, robot rantai tunggal.
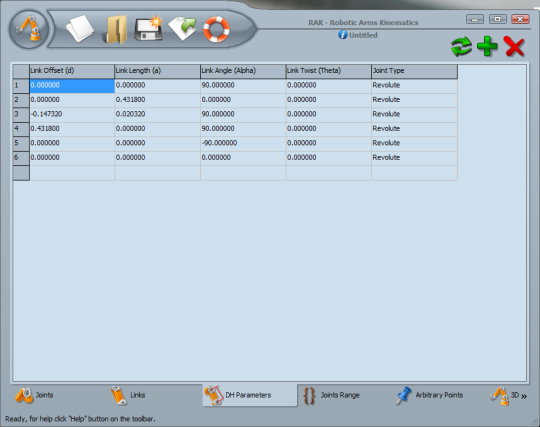
Anda dapat model robot dengan sendi posisi atau Denavit-Hartenberg (DH) parameter.
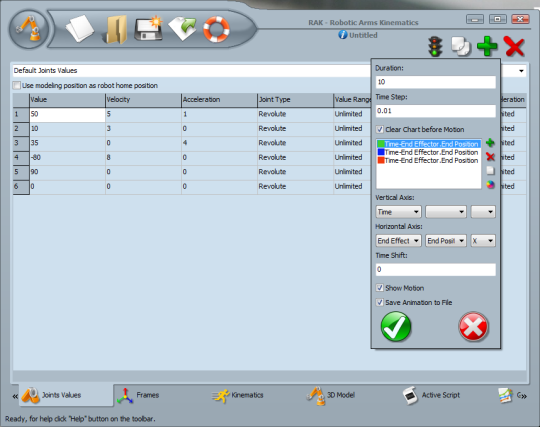
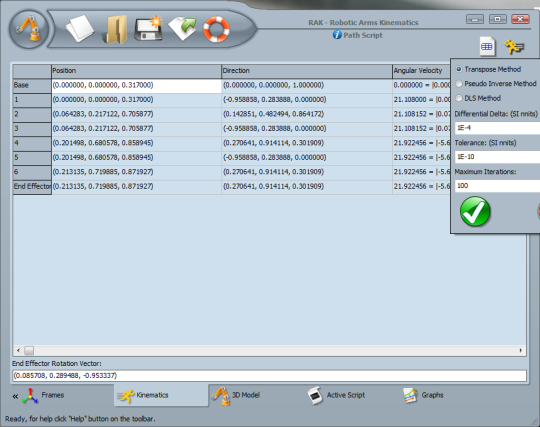
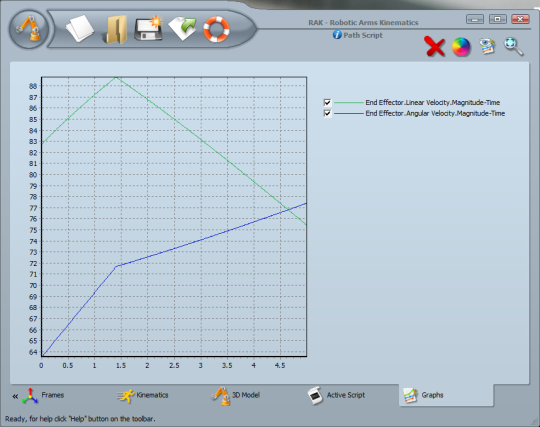
Anda dapat menghitung kinematika dan invers kinematika robot dengan program ini.
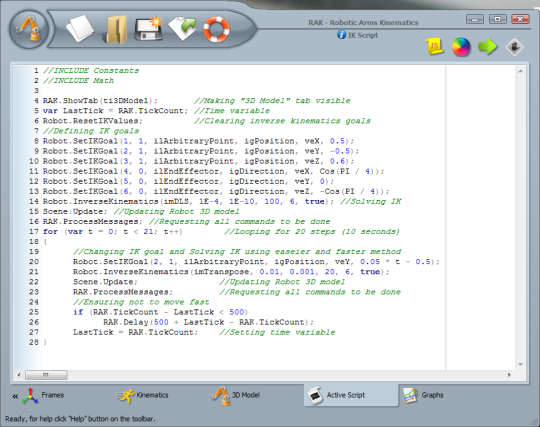
Ada juga area pemrograman untuk menulis program dan mengendalikan robot nyata.

Komentar tidak ditemukan